非线性规划模型
原理
非线性规划(Nonlinear Programming, NLP)模型是一类优化问题,其中目标函数或约束条件至少有一个是非线性的。非线性规划问题的目标是在满足一组约束条件的前提下,最小化或最大化一个非线性函数。
非线性规划模型的一般形式
一个标准的非线性规划模型可以表示为:
1 | minimize f(x) |
这里:
f(x)是需要最小化的非线性目标函数。g_i(x)是不等式约束函数。h_j(x)是等式约束函数。x_L和x_U分别是变量x的下界和上界,即变量范围约束。x表示决策变量的向量。
解决方法
解决非线性规划问题的方法有很多,包括但不限于:
- 梯度下降法:适用于目标函数可微的情况,通过迭代方式寻找局部最优解。
- 牛顿法:利用二阶导数信息来加速收敛。
- 拟牛顿法:如BFGS算法,不需要计算真实的Hessian矩阵,而是使用一阶梯度信息构建近似。
- 内点法:处理带有不等式约束的问题。
- 序列二次规划(SQP):将非线性问题转化为一系列二次规划问题求解。
- 遗传算法、模拟退火等启发式算法:用于求解难以用传统数学方法处理的问题。
应用领域
非线性规划在很多领域都有应用,比如经济学中的资源分配问题、工程设计中的形状优化、化学工业中的反应器设计等。
注意事项
- 非线性规划问题可能有多个局部最优解,找到全局最优解可能是困难的。
- 算法的选择取决于问题的具体特征,例如是否可微、是否有约束以及约束的类型等。
- 实际应用中,可能还需要考虑计算效率和数值稳定性等因素。
代码
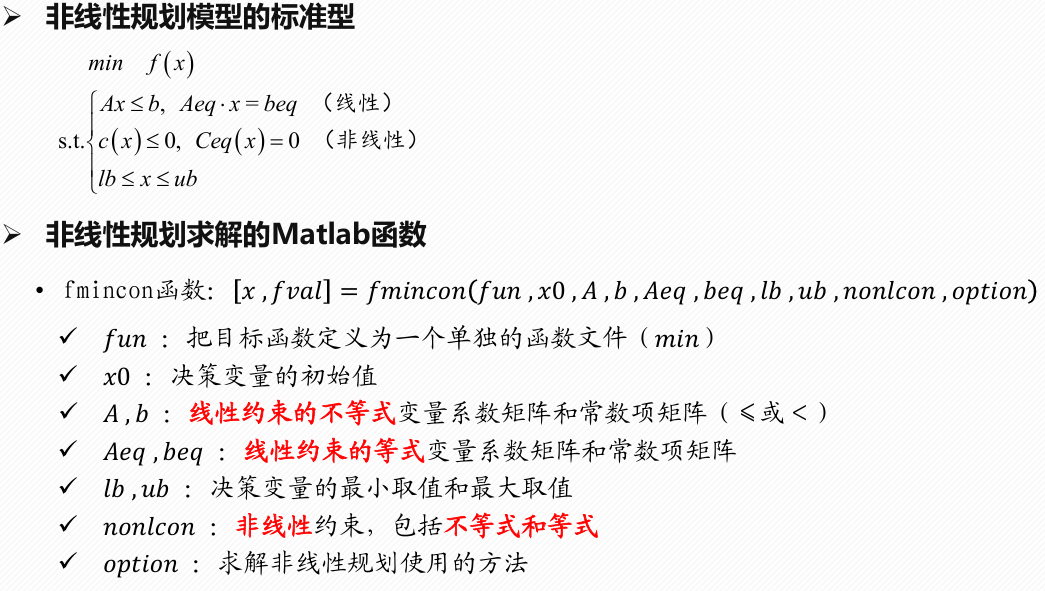
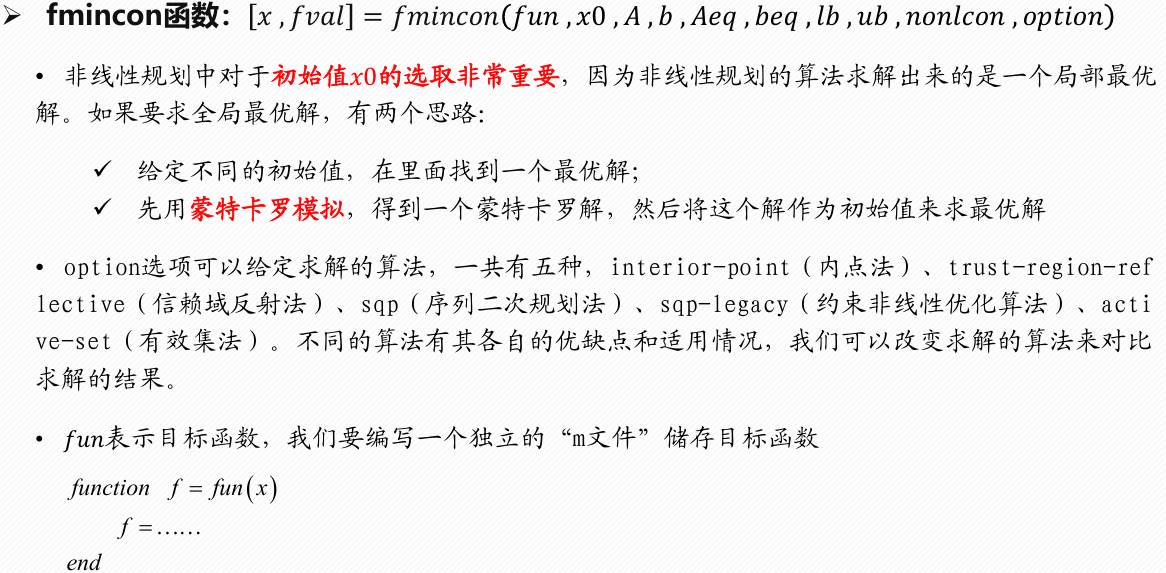
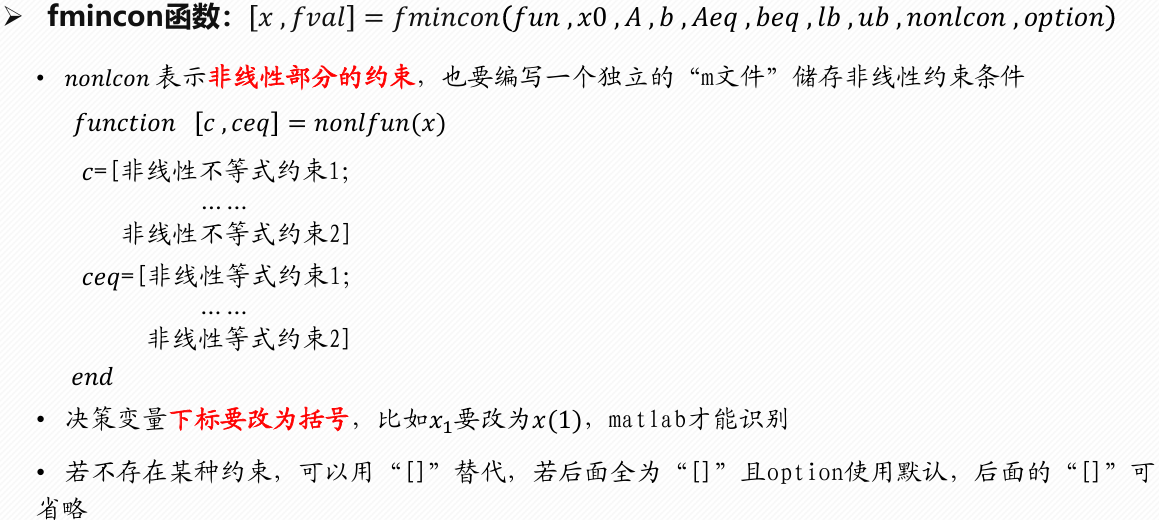
fmincon函数
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 Lee的学习之旅!
相关推荐
2025-01-02
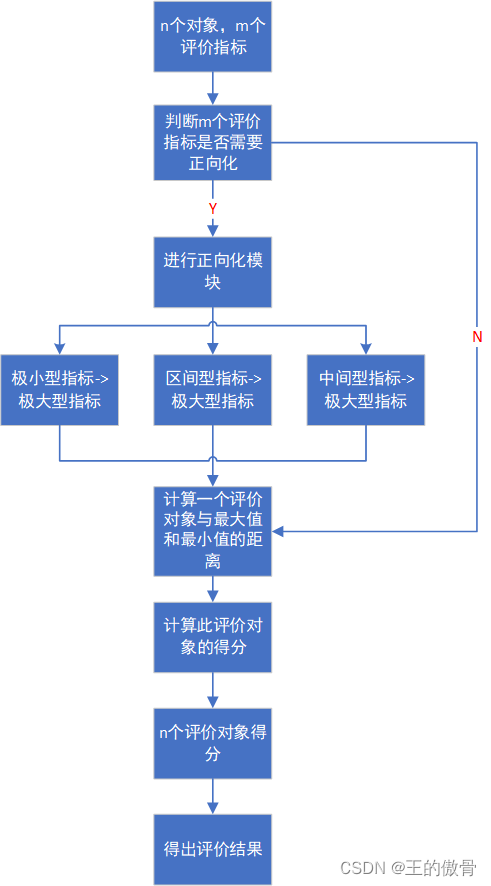
TOPSIS法
原理TOPSIS(Technique for Order Preference by Similarity to Ideal...
2025-01-14
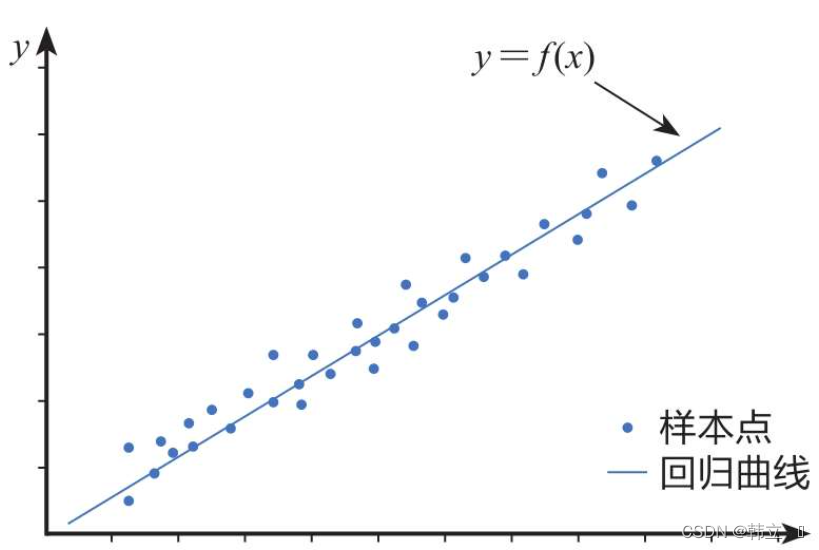
一元线性回归分析模型
原理一元线性回归分析模型(Simple Linear Regression Model)是一种统计方法,用于研究两个连续变量之间的关系:一个因变量(通常记为 (Y))和一个自变量(通常记为 (X))。这个模型假设这两个变量之间存在线性关系,并试图通过最小化预测值与实际观测值之间的差异来拟合一条直线。 残差图作图命令:rcoplot(r,rint) 建模步骤 数据收集:首先需要收集包含因变量和自变量的数据集。 模型设定:设定一元线性回归模型的形式,即 (Y = \beta_0 + \beta_1 X + \epsilon)。 参数估计:使用最小二乘法(Ordinary Least Squares, OLS)等方法来估计未知参数 (\beta_0) 和 (\beta_1)。OLS的目标是找到使残差平方和最小化的参数值,即 (\sum (Y_i - (\beta_0 + \beta_1 X_i))^2)...
2025-01-14
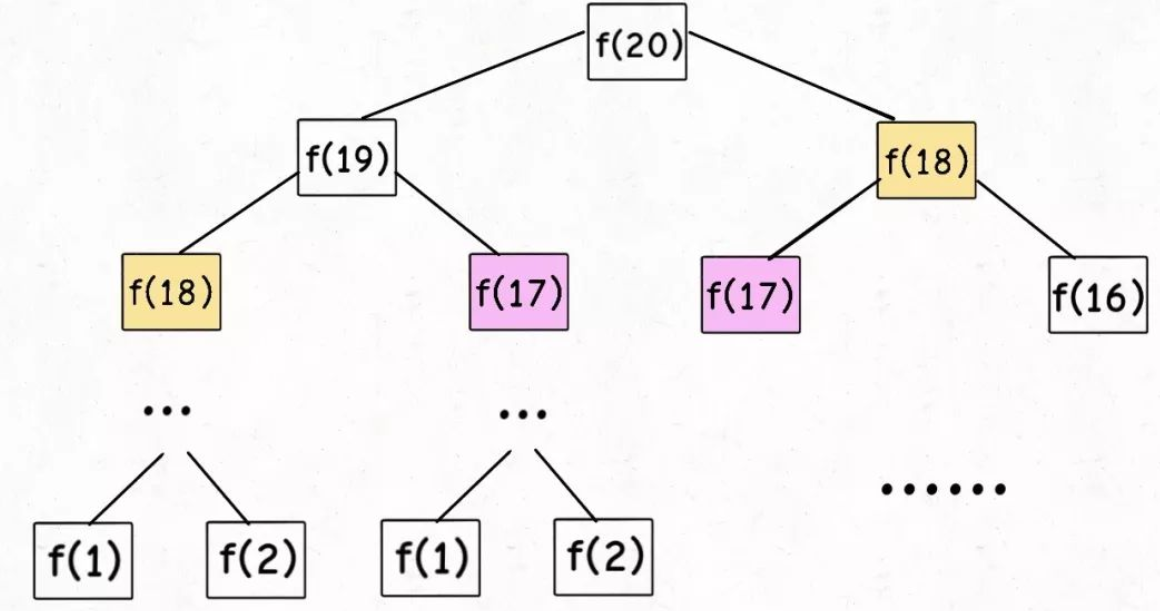
动态规划模型
原理动态规划(Dynamic...
2025-03-18
函数极值与规划模型
矩阵运算12345678910111213141516171819202122232425import numpy as npa=np.array([[1,2,3],[4,5,6]])b=np.array([[1,2],[3,4],[5,6]])c=np.array([[1,2,3]])d=np.array([[9,8,7],[3,2,1]])#矩阵加法sum=a+d#放缩e=3*a#数乘、矩阵乘e=np.dot(a,b)#元素乘e=a*dprint(e)#转置e=c.Tprint(e)e=np.array([[1,2],[3,4]])#逆矩阵result=np.linalg.inv(e)#行列式result=np.linalg.det(e)#矩阵的秩e=np.linalg.matrix_rank(d)print(e) 求一次方程组的解 1234567891011121314151617import numpy as np#用于第一段代码from sympy import...
2025-01-14
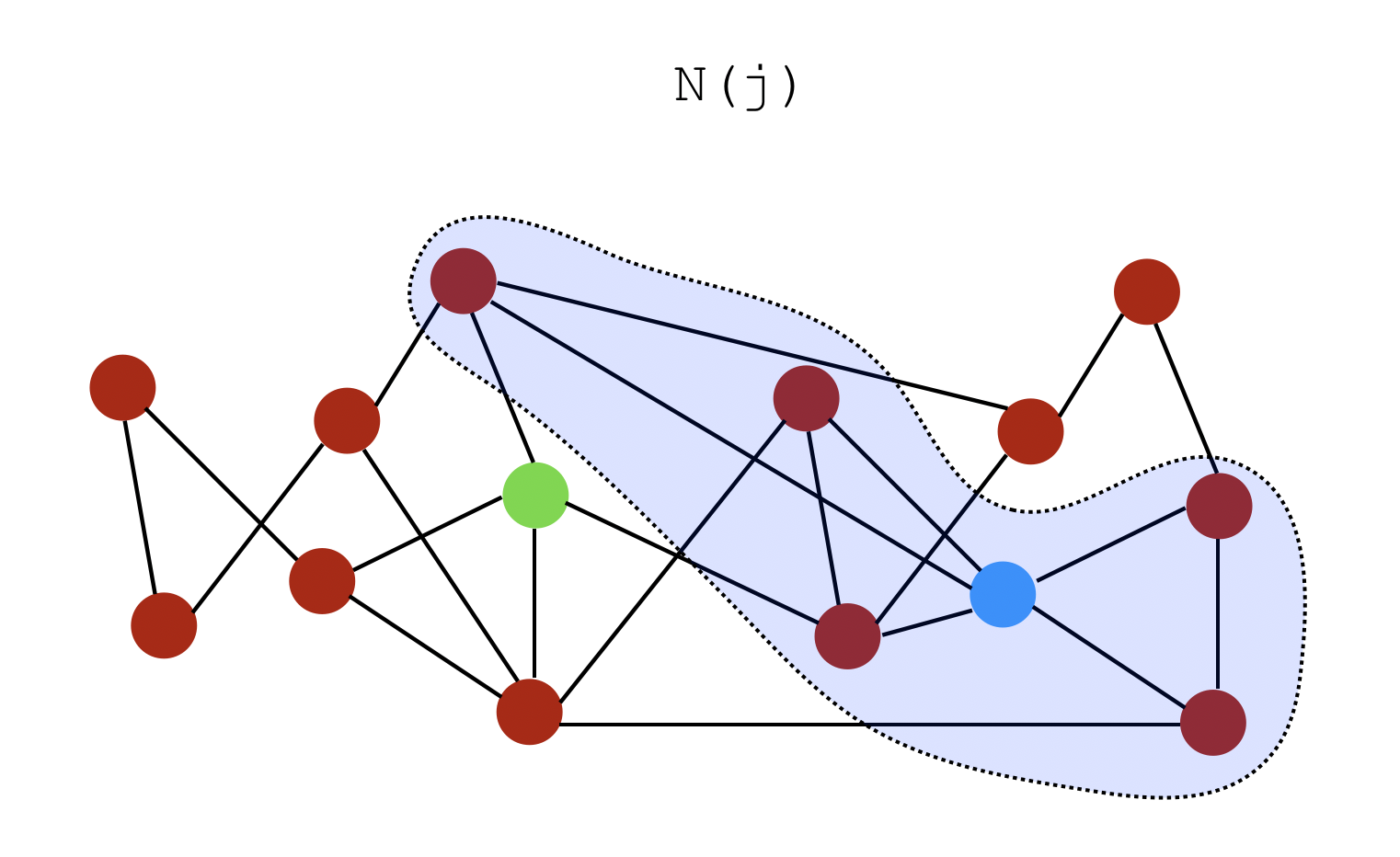
图论模型
Matlab作无向图(1)无权重(每条边的权重默认为1)函数**graph(s,t)**:可在 s 和 t 中的对应节点之间创建边,并生成一个图 s 和 t 都必须具有相同的元素数;这些节点必须都是从1开始的正整数,或都是字符串元胞数组。 注意哦,编号最好是从1开始连续编号,不要自己随便定义编号 123456789101112131415s1 = [1,2,3,4];t1 = [2,3,1,1];G1 = graph(s1, t1);plot(G1)% 下面的命令是在画图后不显示坐标set( gca, 'XTick', [], 'YTick', [] ); % 注意字符串元胞数组是用大括号包起来的哦s2 = {'学校','电影院','网吧','酒店'};t2 = {'电影院','酒店','酒店','KTV'};G2 = graph(s2,...
2025-01-12
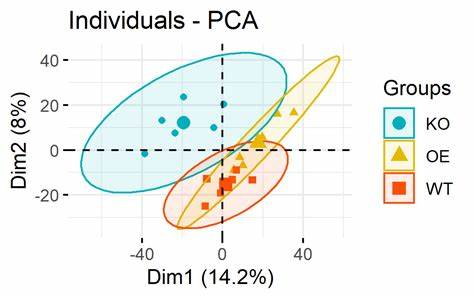
主成分分析法
原理主成分分析法(Principal Component...