原理
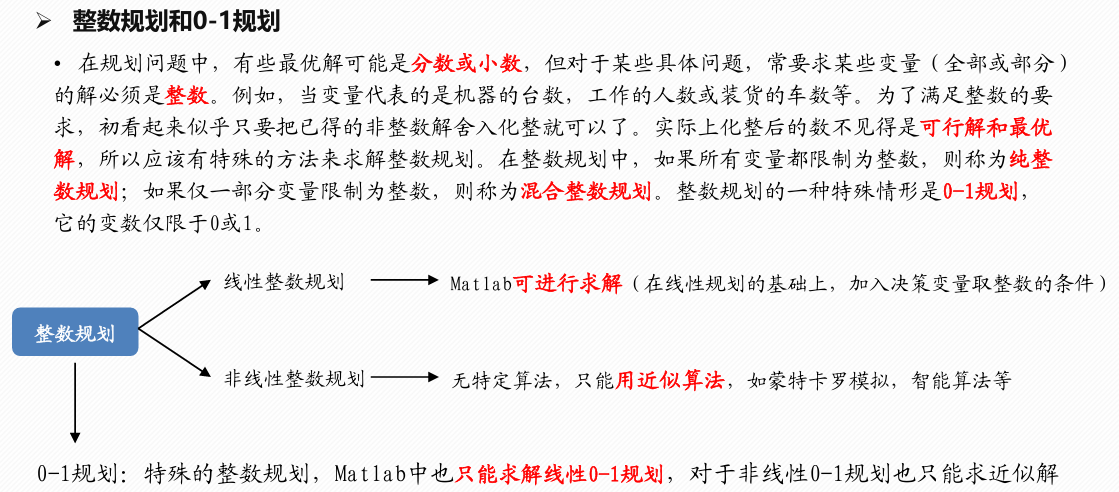
整数规划(Integer Programming, IP)和0-1规划(Binary or Zero-One Programming)是运筹学中线性规划的两个特殊类型,它们在优化问题中用于寻找最优解。这类问题的特点是在决策变量上增加了整数或二进制(0或1)的约束条件。
整数规划
整数规划是指在优化模型中,部分或全部决策变量被要求取整数值的问题。这与普通的线性规划不同,在线性规划中,决策变量可以取任何实数值。整数规划的一个重要子类是纯整数规划(Pure Integer Programming),其中所有决策变量都必须取整数值;而混合整数规划(Mixed Integer Programming, MIP)则允许某些变量取实数值,其他变量取整数值。
整数规划的应用非常广泛,例如项目选择、生产计划、网络设计等。由于整数约束的存在,整数规划问题往往比相应的线性规划问题更难求解,因为它们通常不是凸优化问题,并且可能具有多个局部最优解。
0-1规划
0-1规划是整数规划的一种特殊情况,其中决策变量仅限于取值0或1。这意味着每个变量只能表示“是”或“否”的选择。0-1规划也被称为二进制规划(Binary Programming)。
0-1规划特别适用于需要做出二元选择的情况,如是否投资一个项目、是否选择一条路径、是否分配一项任务等。由于其离散性质,0-1规划问题通常采用分支定界法(Branch and Bound)、切割平面法(Cutting Plane Method)或启发式算法来求解。
解决方法
对于这两种类型的规划问题,常用的方法包括但不限于:
- 分支定界法:通过系统地分割问题空间并为每个子问题计算界限,逐步缩小可行解范围。
- 切割平面法:向原问题添加额外的约束(称为切割平面)以去除非整数解,直到找到整数解为止。
- 动态规划:适合解决特定结构的整数规划问题。
- 启发式和元启发式算法:如遗传算法、模拟退火、禁忌搜索等,这些方法不保证找到全局最优解,但可以在合理的时间内找到满意解。
整数规划和0-1规划在实际应用中非常重要,尤其是在涉及资源分配、组合优化等领域。由于这些问题往往是NP难问题,即随着问题规模增大,计算复杂度会急剧增加,因此研究者们不断探索新的算法和技术以提高求解效率。
代码
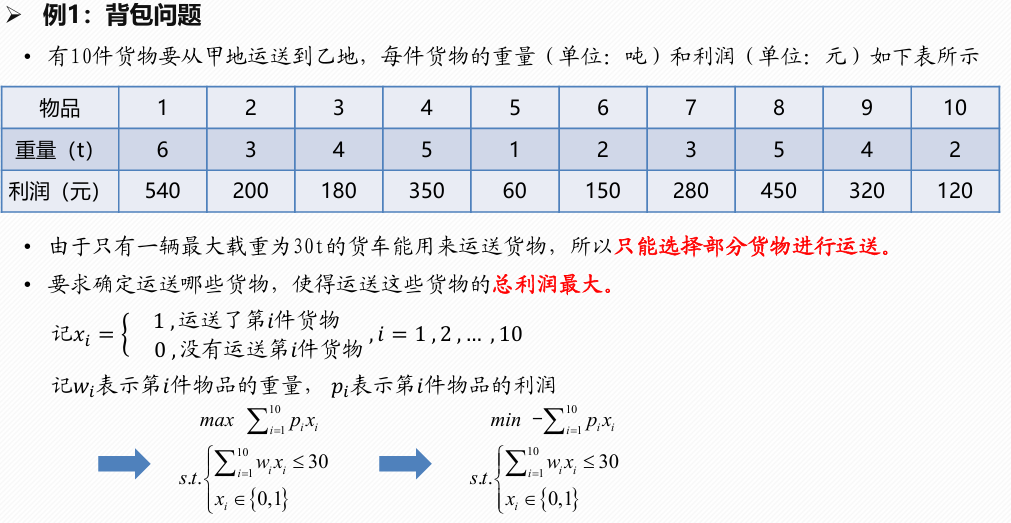
背包问题
1
2
3
4
5
6
7
8
9
10
|
c = -[540 200 180 350 60 150 280 450 320 120];
intcon=[1:10];
A = [6 3 4 5 1 2 3 5 4 2]; b = 30;
Aeq = []; beq =[];
lb = zeros(10,1);
ub = ones(10,1);
[x,fval]=intlinprog(c,intcon,A,b,Aeq,beq,lb,ub)
fval = -fval
|
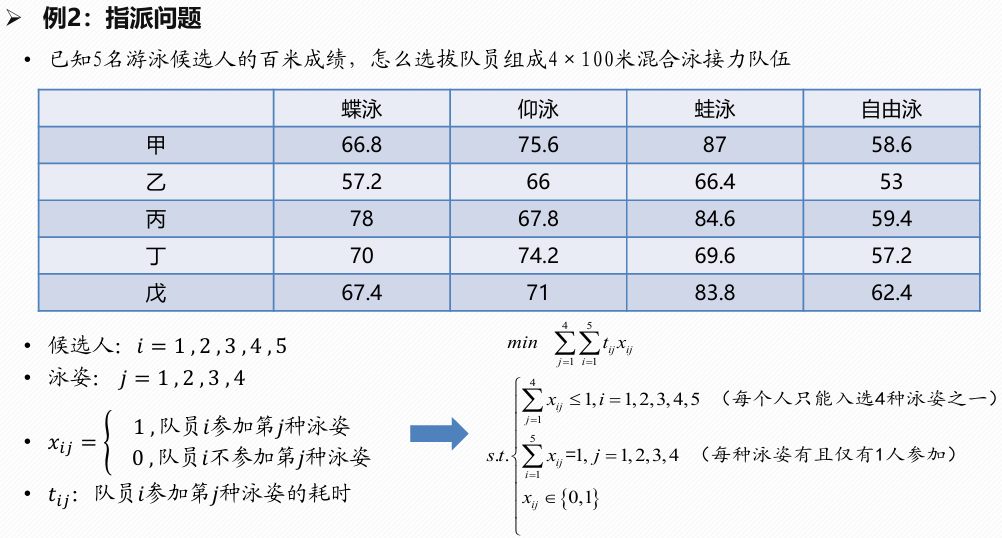
指派问题
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
| A
clear;clc
c = [66.8 75.6 87 58.6 57.2 66 66.4 53 78 67.8 84.6 59.4 70 74.2 69.6 57.2 67.4 71 83.8 62.4]';
intcon = [1:20];
A = [1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 1 1 1 1 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1];
b = [1;1;1;1;1];
Aeq = [1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0;
0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0;
0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0;
0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0 1];
beq = [1;1;1;1];
lb = zeros(20,1);
ub = ones(20,1);
[x,fval] = intlinprog(c,intcon,A,b,Aeq,beq,lb,ub)
|
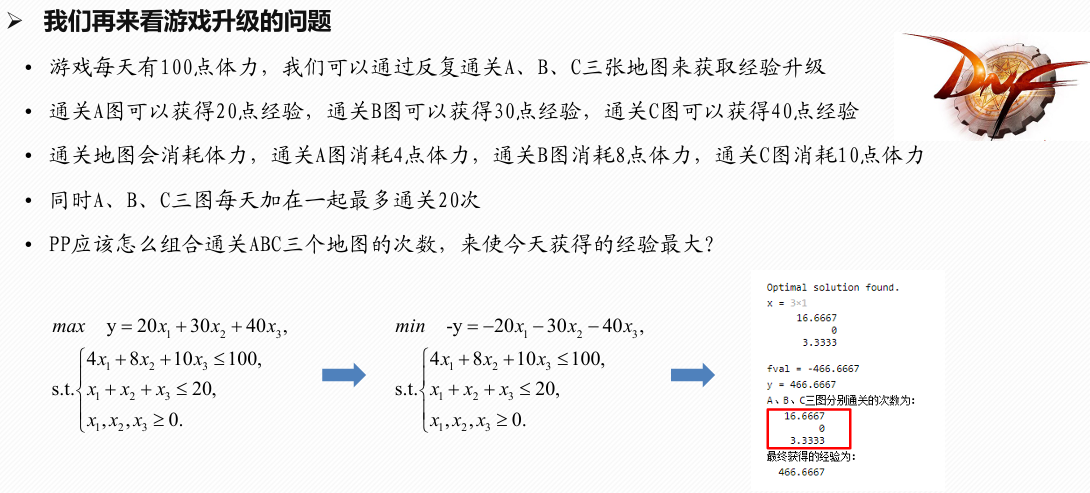
游戏升级
1
2
3
4
5
6
7
8
9
10
11
12
| clc , clear
f = [-20 ;-30 ;-40];
intcon=[1:3]
A = [4 ,8 ,10;1 ,1 ,1;];
b = [100 ;20];
lb = zeros(3 ,1);
[x,fval] = intlinprog(f ,intcon, A ,b ,[] ,[] ,lb)
y = -fval
disp('A、B、C三图分别通关的次数为:')
disp(x)
disp('最终获得的经验为:')
disp(y)
|