多目标规划模型
原理
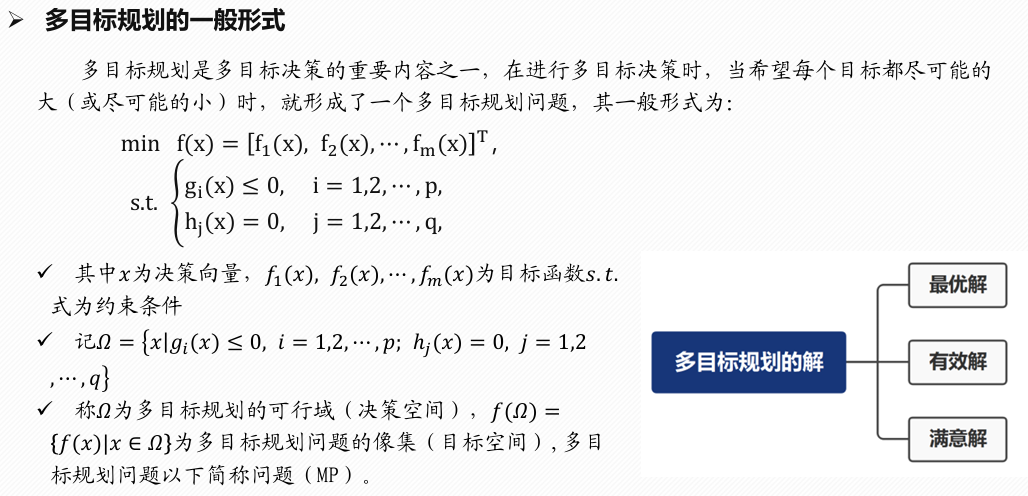
多目标规划模型是一种数学建模方法,它允许决策者同时优化多个目标函数。在现实世界的问题中,通常会遇到需要同时考虑多个不同且常常相互冲突的目标的情况。例如,在一个企业资源分配问题中,可能希望最大化利润的同时最小化成本和环境影响。
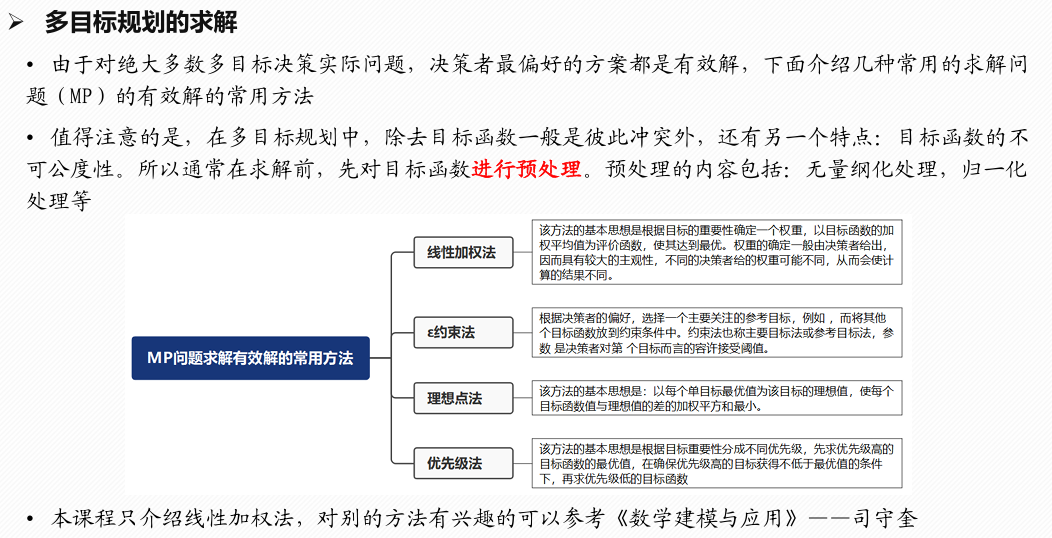
解决多目标规划问题的方法有很多,包括但不限于:
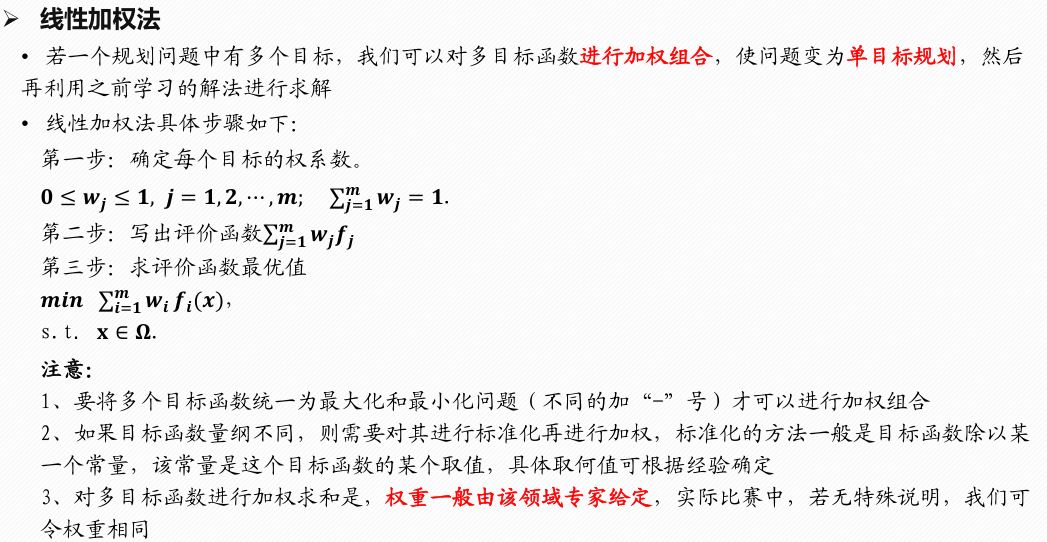
- 加权和法:将所有目标通过赋予不同的权重组合成一个单一的目标函数进行优化。
- ε-约束法:选择一个目标作为主要目标进行优化,而其他目标则被转化为约束条件。
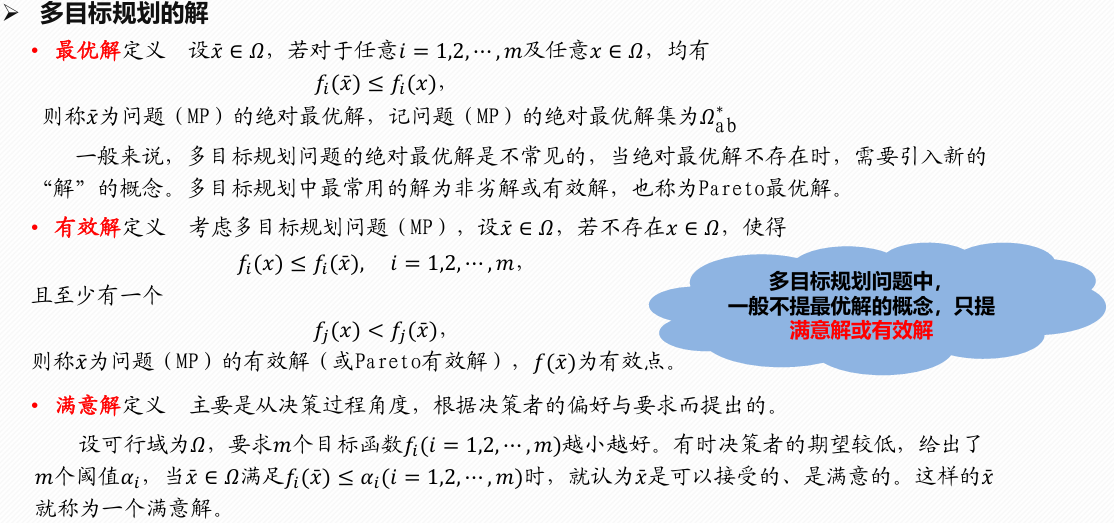
- 帕累托最优解集:寻找不是由任何其他解决方案支配的解,即帕累托前沿上的点。
- 进化算法:如遗传算法、粒子群优化等,它们可以用来近似找到帕累托最优解。
- 妥协规划:通过定义理想点和计算每个可行解与理想点的距离来找到最佳折衷解。
每种方法都有其适用场景和局限性,选择哪种方法取决于具体问题的特点以及决策者的偏好。

代码
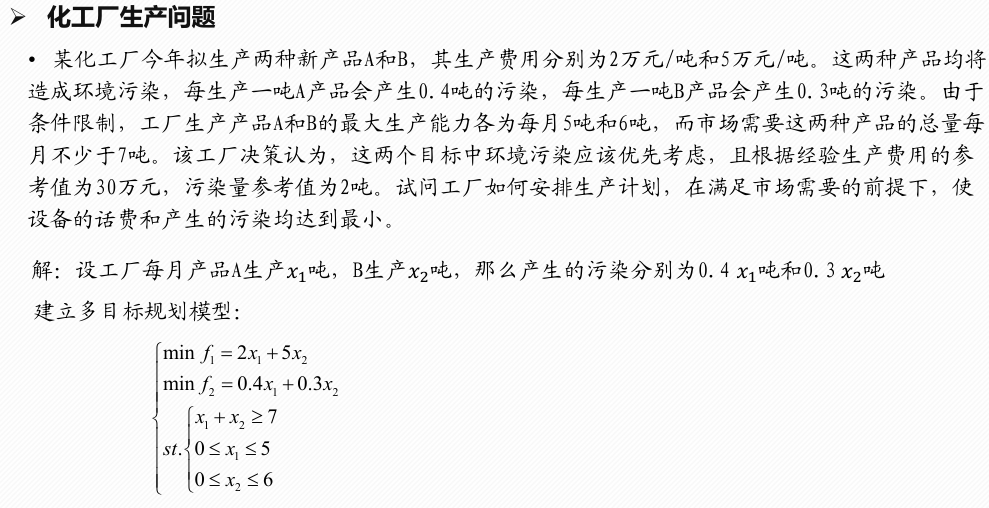
多目标规划问题
1 | w1 = 0.4; w2 = 0.6; % 两个目标函数的权重 x1 = 5 x2 = 2 |
敏感性分析
1 | clear;clc |
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来源 Lee的学习之旅!
相关推荐
2025-01-02
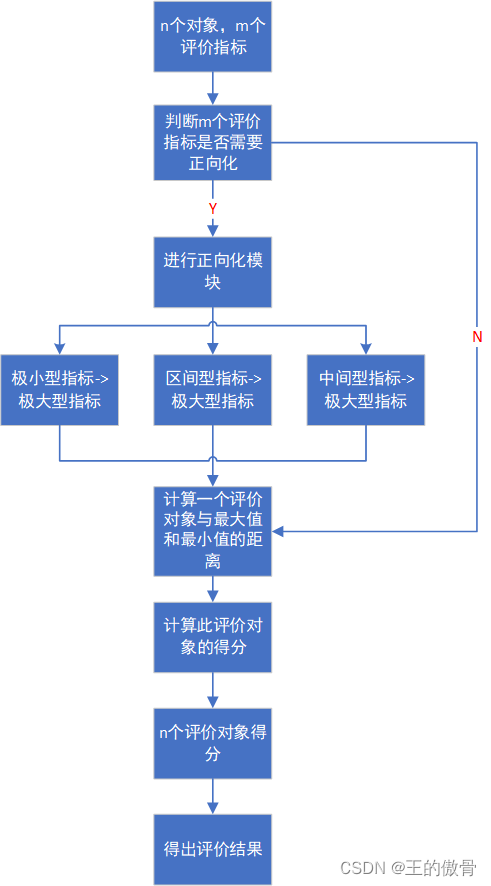
TOPSIS法
原理TOPSIS(Technique for Order Preference by Similarity to Ideal...
2025-01-14
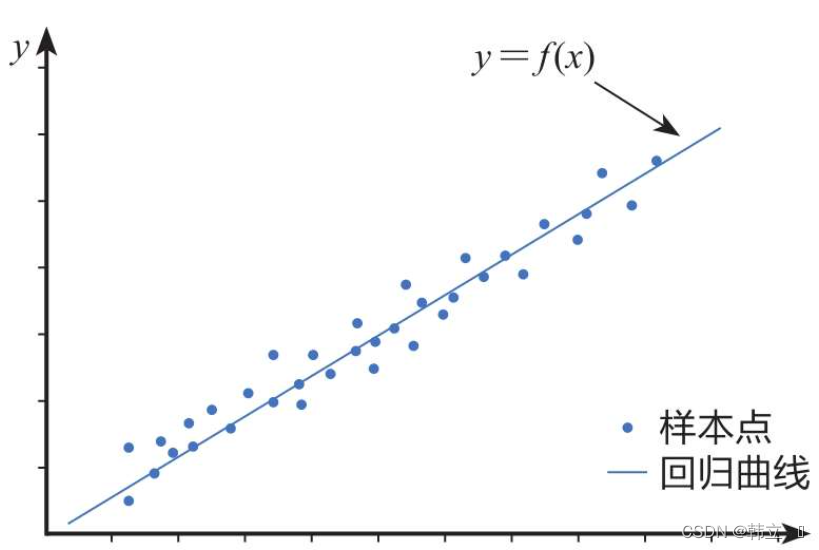
一元线性回归分析模型
原理一元线性回归分析模型(Simple Linear Regression Model)是一种统计方法,用于研究两个连续变量之间的关系:一个因变量(通常记为 (Y))和一个自变量(通常记为 (X))。这个模型假设这两个变量之间存在线性关系,并试图通过最小化预测值与实际观测值之间的差异来拟合一条直线。 残差图作图命令:rcoplot(r,rint) 建模步骤 数据收集:首先需要收集包含因变量和自变量的数据集。 模型设定:设定一元线性回归模型的形式,即 (Y = \beta_0 + \beta_1 X + \epsilon)。 参数估计:使用最小二乘法(Ordinary Least Squares, OLS)等方法来估计未知参数 (\beta_0) 和 (\beta_1)。OLS的目标是找到使残差平方和最小化的参数值,即 (\sum (Y_i - (\beta_0 + \beta_1 X_i))^2)...
2025-01-14
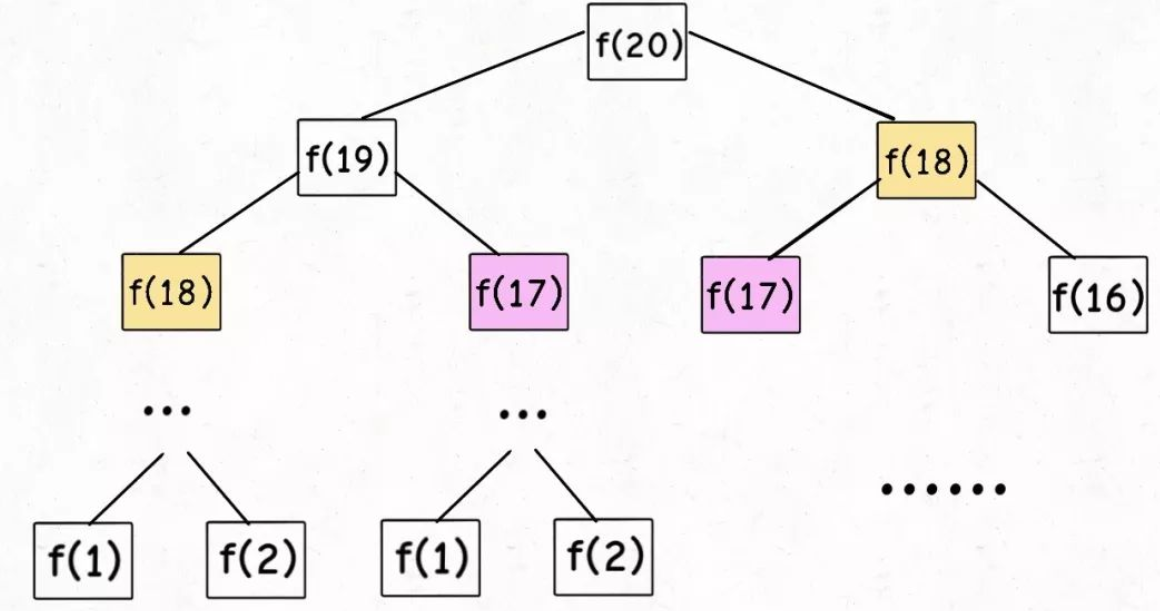
动态规划模型
原理动态规划(Dynamic...
2025-03-18
函数极值与规划模型
矩阵运算12345678910111213141516171819202122232425import numpy as npa=np.array([[1,2,3],[4,5,6]])b=np.array([[1,2],[3,4],[5,6]])c=np.array([[1,2,3]])d=np.array([[9,8,7],[3,2,1]])#矩阵加法sum=a+d#放缩e=3*a#数乘、矩阵乘e=np.dot(a,b)#元素乘e=a*dprint(e)#转置e=c.Tprint(e)e=np.array([[1,2],[3,4]])#逆矩阵result=np.linalg.inv(e)#行列式result=np.linalg.det(e)#矩阵的秩e=np.linalg.matrix_rank(d)print(e) 求一次方程组的解 1234567891011121314151617import numpy as np#用于第一段代码from sympy import...
2025-01-14
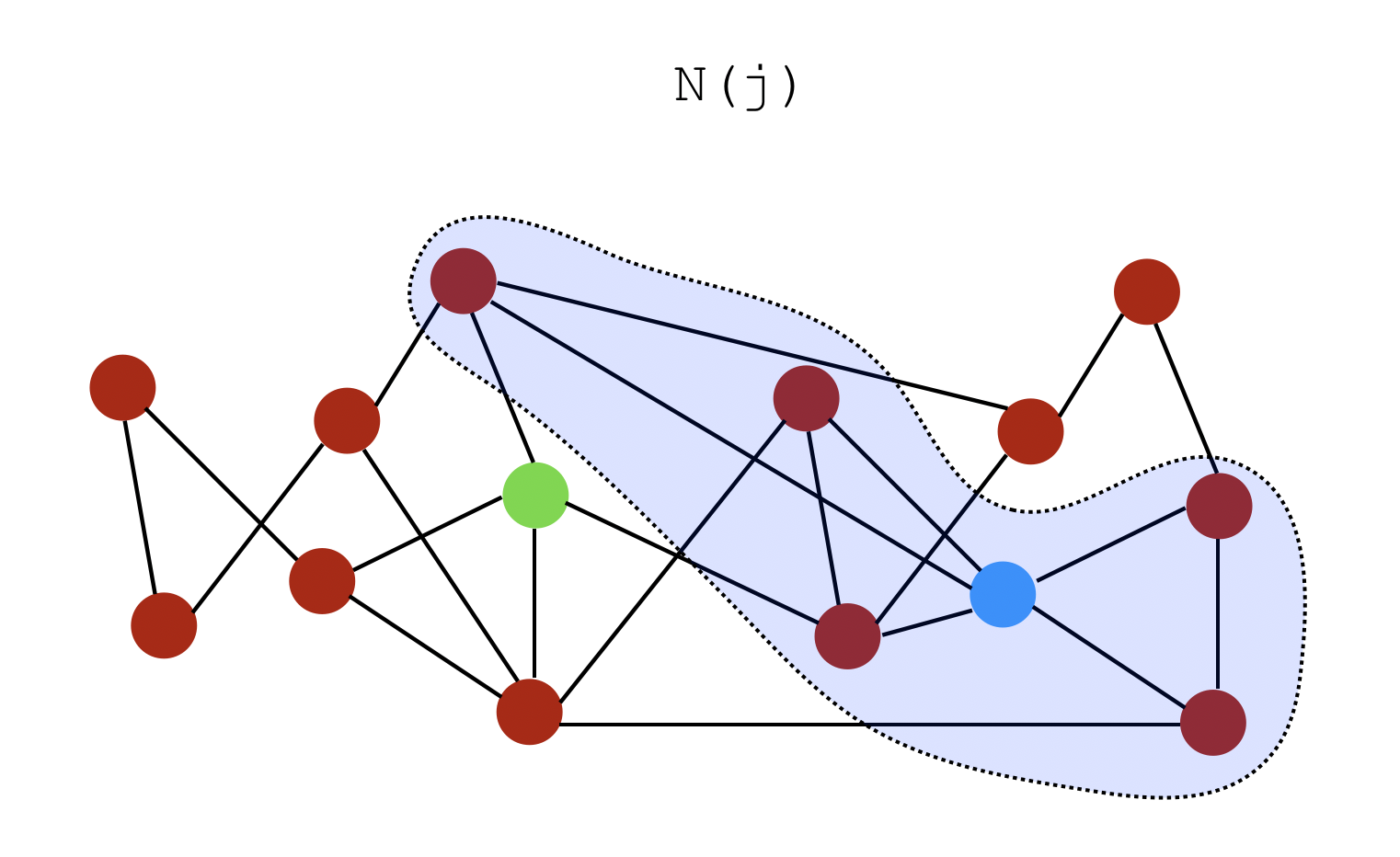
图论模型
Matlab作无向图(1)无权重(每条边的权重默认为1)函数**graph(s,t)**:可在 s 和 t 中的对应节点之间创建边,并生成一个图 s 和 t 都必须具有相同的元素数;这些节点必须都是从1开始的正整数,或都是字符串元胞数组。 注意哦,编号最好是从1开始连续编号,不要自己随便定义编号 123456789101112131415s1 = [1,2,3,4];t1 = [2,3,1,1];G1 = graph(s1, t1);plot(G1)% 下面的命令是在画图后不显示坐标set( gca, 'XTick', [], 'YTick', [] ); % 注意字符串元胞数组是用大括号包起来的哦s2 = {'学校','电影院','网吧','酒店'};t2 = {'电影院','酒店','酒店','KTV'};G2 = graph(s2,...
2025-01-12
主成分分析法
原理主成分分析法(Principal Component...